|
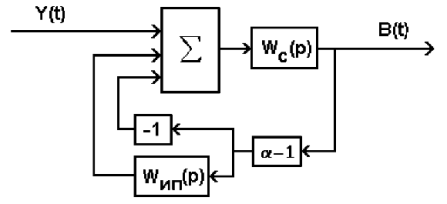
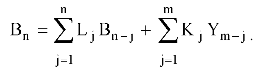
ОДЕСЬКИЙ ДЕРЖАВНИЙ ПОЛІТЕХНІЧНИЙ УНІВЕРСИТЕТ Задерейко Олександр Владиславович УДК 681.325 СПЕЦІАЛІЗОВАНІ КОРЕКТУЮЧІ ПРИСТРОЇ ОБРОБКИ РЕЗУЛЬТАТІВ НЕПРЯМИХ ВИМІРЮВАНЬ У СИСТЕМАХ КОНТРОЛЮ ТА КЕРУВАННЯСпеціальність 05.13.05. - Елементи та пристрої обчислювальної техніки та систем управлінняАвтореферат дисертації на здобуття наукового ступеня кандидата технічних наукОдеса - 1998 Дисертацією є рукопис. Робота виконана в Одеському державному політехнічному університеті Міністерства освіти України Науковий керівник : доктор технічних наук Тіхончук Сергій Тимофійович, завідувач кафедри автоматики та управління у технічних системах Одеського державного політехнічного університету. Офіційні опоненти : доктор технічних наук, професор Карповський Юхим Яковлевич, проректор Одеського державного медичного університету кандидат технічних наук, доцент Препелиця Георгій Петрович, завідувач кафедри автоматизації гідрометеорологічних вимірювань Одеського гідрометеорологічного інституту. Провідна установа : Науково - дослідний інститут "Шторм", м. Одеса. Захист відбудеться 9 липня 1998 р. о 13:30 годині на засіданні спеціалізованої вченої ради Д 41.052.01 в Одеському державному політехнічному університеті за адресою: 270044, м. Одеса, пр. Шевченка, 1. З дисертацією можна ознайомитися у бібліотеці Одеського державного політехнічного університету, м. Одеса, пр. Шевченка, 1. Автореферат розісланий 1 червня 1998 г. Вчений секретар спеціалізованої вченої ради, професор Ю. С. Ямпольський ЗАГАЛЬНА ХАРАКТЕРИСТИКА РОБОТИАктуальність теми. У сучасних системах контролю та керування різними об'єктами виникає необхідність перетворення контролюємих параметрів у вимірювальні сигнали, які використовуються для формування команд керування. На практиці таке перетворення виконується у вимірювальних системах (ВС) за допомогою вимірювальних перетворювачів (ВП) - датчиків різного призначення. Характеристики ВП впливають на точністні характеристики ВС та природною подобою визначають якість контролю та керування. Однак, в силу присутності інерційності ВП та впливу перешкод різного походження, вимірювальні сигнали зазнають не прогнозовані спотворення. Традиційні підходи щодо зниження таких спотворень дозволяють отримати позитивні результати, але усі вони зводяться у підсумку до доробки вже існуючих або розробки більш досконалих конструкцій ВП. Крім того їх реалізація, як правило, відрізняється високою складністю і в існуючих техніко-економічних умовах уявляється недоцільною із-за великих витрат. У зв'язку з цим на практиці для компенсації інерційності ВП та подавлення діючих перешкод при мінімумі витрат вдаються до структурної корекції ВС. Її застосування міститься у введенні в ВС коректуючих пристроїв (КП). Властивості КП вибираються таким чином, щоб отримати сигнал на його виході як найбільш близьким до реального закону зміни контролюемого параметра. У цьому випадку можливо досягнення такого ступеня компенсації інерційності ВП та подавлення діючих перешкод, який забезпечує якість контролю та керування, яка вимагається. При цьому не потрібно внесення будь-яких змін у системи контролю та керування, а витрати на розробку КП занадто малі у порівнянні з витратами на реалізацію традиційних підходів. Розглядуєма задача компенсації інерційності ВП та подавлення діючих перешкод є частковим випадком загальної задачі обробки результатів непрямих вимірювань, яка також може бути ефективно вирішена з використанням КП. Існуючі структури КП, відповідаючи вимогам, які ставляться до забезпечення необхідного ступеню компенсації інерційності ВП (від 1,5 до 100 разів), не забезпечують повне подавлення діючих перешкод. Реалізація відомих підходів, забезпечуючих подавлення КП діючих перешкод заснована на використанні низькочастотної фільтрації їх вхідних та вихідних сигналів. Це призводить до істотного збільшення спотворень ВС, а також апаратних витрат на побудову КП. Внаслідок цього, розробка та побудова спеціалізованих КП, забезпечуючих компенсацію інерційності ВП та подавлення діючих перешкод при мінімумі витрат, уявляє актуальну задачу, рішення якої дозволить підвищити якість контролю та керування. Зв'язок роботи з науковими програмами, планами, темами. Дослідження проводились згідно з проектами № 12.3/99, № 1/749 "Гибрид" Державного фонду фундаментальних досліджень України з 1992 по 1995 рр., а також у межах держбюджетних та госпдоговірних науково-дослідних робіт ОДПУ. Мета та завдання досліджень. Основною метою роботи є розробка структури та методики розрахунку параметрів спеціалізованих коректуючих пристроїв для обробки результатів непрямих вимірювань, забезпечуючих компенсацію інерційності вимірювальних перетворювачів та подавлення діючих перешкод та їх використання для підвищення точносних характеристик систем контролю та керування. У відповідності з метою виконувались такі завдання:1. Розробити структуру спеціалізованого КП для обробки результатів непрямих вимірювань від ВП, яка забезпечує компенсацію інерційності ВП та подавлення діючих перешкод. 2. Розробити методику розрахунку параметрів спеціалізованого КП при подавленні діючих перешкод та компенсації інерційності ВП, які моделюються аперіодичною ланкою першого та другого порядків. 3. Отримати дискретну модель спеціалізованого КП: різносні рівняння та співвідношення для розрахунку їх параметрів. 4. Провести експериментальне оцінювання точносних характеристик ВС при обробці результатів непрямих вимірювань аналоговим та дискретним варіантами спеціалізованого КП. 5. Виконати експериментальне дослідження якості обробки спеціалізованим КП сигналів від ВП, які моделюються аперіодичною ланкою першого та другого порядків. Наукова новизна1. Розроблено структуру спеціалізованого КП для обробки результатів непрямих вимірювань від ВП, яка забезпечує подавлення діючих перешкод та компенсацію інерційності ВП. 2. Створено математичні моделі аналогової та дискретної реалізації спеціалізованого КП та розроблено методику розрахунку його параметрів, які забезпечують подавлення діючих перешкод та компенсацію інерційності ВП. 3. Отримані оцінки зміщеної та незміщеної складових помилки ВС, що містить спеціалізований КП, та доведено, що залежність результуючої помилки ВС від параметра регулярізації а має екстремум, у якому вона становиться мінімально можливою, тобто розроблена структура спеціалізованого КП має регулярізуючі властивості. Практичне значення одержаних результатівРезультати дисертаційної роботи дозволяють утворити спеціалізовані КП, які забезпечують подавлення діючих перешкод і компенсацію інерційності ВП. Такі спеціалізовані КП орієнтовані на застосування в існуючих або знов створюваних ВС для обробки результатів непрямих вимірювань, працюючих в умовах з підвищеним рівнем перешкод, що дає суттєвий економічний та технічний ефекти. Реалізація та впровадження одержаних результатівРозроблений спеціалізований КП впроваджено автором на технологічній лінії для виробництва харчових продуктів ВП "СТАСЛА" у м. Херсоні в 1997 р. Особистий внесок здобувачаУ дисертаційній роботі використовуються результати, які були одержані автором та опубліковані у спільних працях: - у роботах [2], [3] здійснено оцінку якості обробки спеціалізованим КП сигналів від ВП та показано, що реалізація розробленої методики розрахунку параметрів спеціалізованого КП дозволяє виключити використання низькочастотної фільтрації вхідного та вихідного сигналів, та його декомпозицію на каскади при подавленні діючих перешкод та компенсації інерційності ВП, який моделюється аперіодичною ланкою другого порядку . - у роботі [4] розроблено структуру спеціалізованого КП та методику розрахунку його параметрів. Доказані регулярізуючи властивості спеціалізованого КП; - у роботах [6], [8], [9] здійснено експериментальне дослідження точносних характеристик ВС, що містить спеціалізований КП. ПублікаціїОсновний зміст дисертаційної роботи опубліковано у 9 друкованих роботах, в т. ч. у 4 статтях, надрукованих у фахових журналах та збірках праць, 2 збірках праць наукових конференцій, 3 статті задепоновано. Апробація роботиОсновні положення та результати роботи були викладені та обговорювались на другій та третій українських конференціях з автоматичного керування "Автоматика - 95", Львів, вересень 1995 р., "Автоматика - 96", Севастополь, вересень, 1996 р. Структура та об'єм роботиДисертаційна робота складається з вступу, чотирьох розділів, висновку, списку використаної літератури та додатка. Загальний об'єм роботи становить 107 сторінок, 33 рисунка, список використаних джерел містить 117 найменувань, 1 додаток. ОСНОВНИЙ ЗМІСТ РОБОТИУ вступі обґрунтовано актуальність теми дисертаційної роботи. Сформульовано мету та завдання досліджень, викладені основні наукові та практичні результати роботи, сформульовані основні положення, що мають бути винесені до захисту. В першому розділі виконано аналіз, у якому розглянуто інформаційні аспекти ВС, джерела виникнення спотворень у ВС, сучасні підходи до зниження та компенсації таких спотворень, обґрунтовуються завдання досліджень роботи. В другому розділі розроблено структуру спеціалізованого КП для обробки результатів непрямих вимірювань (Рис.1), яку утворено за допомогою введення ланки динамічної корекції W(р) у ланцюг зворотнього зв'язку існуючого КП. Рис. 1. Структура спеціалізованого КП.Спеціалізований КП реалізує передатну функцію (ПФ): Wкп = 1 / Wвп(p) + aWвп(p) - a + 1 + Wс-1 (1) де а - параметр регулярізації; Wвп(p) - ПФ ВП, яка моделюється аперіодичною ланкою: де Тк - коефіцієнти, що визначаються експериментально та характеризують інерційность ВП; Wс(р) - дрібно-раціональна ПФ ланки динамічної корекції: У(t), В(t) - відповідно вхідний та вихідний сигнали спеціалізованого КП. Виконавши необхідні підстановки у (1), запишемо характеристичне рівняння спеціалізованого КП: Для ефективної обробки сигналів від ВП необхідно вибором ПФ ланки динамічної корекції Wc(р) досягнути підвищення порядку ПФ ВС на n одиниць таким чином, щоб порядок ПФ ланки динамічної корекції Wc(р) був більший, або рівний порядку ПФ ВП (n ≥ к).
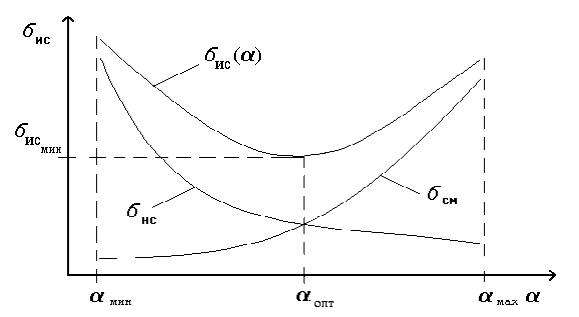
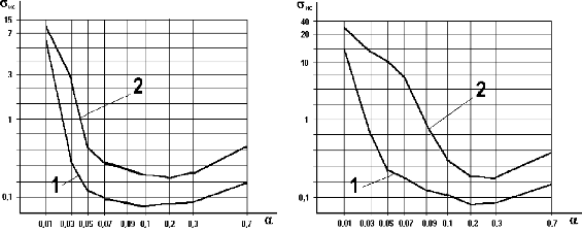
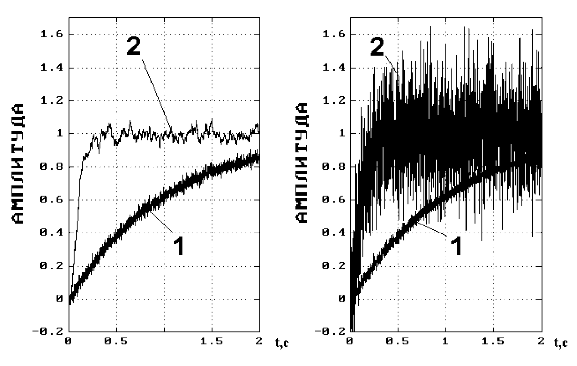
Величину n необхідно у кожному випадку вибирати з урахуванням компромісу між підвищенням ефективності спеціалізованого КП з одного боку, та підвищенням витрат на його реалізацію з другого. Для забезпечення аперіодичного характеру перехідного процесу на виході спеціалізованого КП необхідно, щоб усі коефіцієнти характеристичного рівняння (4) були позитивними, а його корені були дійсними та негативними. Відзначимо, що коефіцієнти Тк у (2) відмінні від нуля та задаються апріорі. Якщо покласти коефіцієнт h0≠0, при будь-якій кількості коефіцієнтів hі=0 або їх скороченні, завжди можна підібрати коефіцієнти fj ланки динамічної корекції W(р) таким чином, щоб усі коефіцієнти при ступенях рj у (4) були позитивними. При цьому вибір коефіцієнтів fj зводиться до находження співвідношень для розрахунку їх чисельних значень. Одержані співвідношення для розрахунку чисельних значень коефіцієнтів fj ланки динамічної корекції Wc(р), яка забезпечує: 1) Подавлення діючих перешкод та компенсацію інерційності ВП, який моделюється аперіодичною ланкою першого порядку. 2) Компенсацію інерційності ВП, який моделюється аперіодичною ланкою другого порядку. 3) Подавлення діючих перешкод поряд з компенсацією інерційності ВП, який моделюється аперіодичною ланкою другого порядку. Відзначено, що реалізація спеціалізованим КП розробленої методики розрахунку параметрів спеціалізованого КП дозволяє виключити його декомпозицію на каскади при обробці результатів непрямих вимірювань від ВП, які моделюються аперіодичною ланкою другого порядків. Одержані співвідношення для розрахунку чисельних значень зміщеної та незміщеної складових помилки ВС, що містить спеціалізований КП при поданні на вхід ВП одиничної ступінчастої дії та випадкового нормального процесу на вхід КП відповідно. Визначено, що зміщена складова помилки ВС зростає, а незміщена складова помилки зменшується при підвищенні параметра регулярізації а. Внаслідок цього, залежність результуючої помилки ВС (суми зміщеної та незміщеної складових) від параметра регулярізації а має екстремум, у якому вона становиться мінімально можливою (Рис. 2). Тим самим доведено, що спеціалізований КП має регулярізуючі властивості. Для визначення параметра регулярізації a можливо застосування відомих критеріїв вибору. Далі в обчислювальних експериментах параметр регулярізації a визначається за допомогою метода модельних еталонних прикладів. Рис. 2. Залежність результуючої помилки ВС від параметру регуляризації а.У третьому розділі виконується перехід від аналогового спеціалізованого КП до його дискретного еквіваленту - цифрового спеціалізованого КП. Показано, що цифровий КП описується лінійним різносним рівнянням: де Уn-j, Вn-j - значення вхідного та вихідного сигналів цифрового КП у моменти часу (n-j)h, hі - шаг дискретизації по часу, Кj - коефіцієнти різносного рівняння цифрового КП. Відзначено, що найбільш ефективним методом, який дозволяє добитися високої адекватності цифрового КП аналоговому прототипу КП, є метод декомпозиції, бо він забезпечує точну збіжність в точках дискретизації з результатами, одержаними за допомогою вихідної аналогової ПФ, яка реалізується КП. Змодельовані КП на основі різносних рівняннь, які еквівалентні аналоговим ПФ, що синтезуються на основі співвідношень для розрахунку чисельних значень коефіцієнтів fj ланки динамічної корекції Wс(р), одержаних у другому розділі. Знайдено співвідношення для визначення параметрів моделей КП на основі різносних рівнянь. Відзначено, що різносні рівняння можуть бути реалізовані програмним або апаратним способами. Одержано співвідношення для розрахунку чисельних значень зміщеної та незміщеної складових помилки ВС, що містить цифровий спеціалізований КП при поданні на вхід ВП одиничної ступінчастої дії та випадкового нормального процесу на вхід КП відповідно. Визначено, що зміщена складова помилки ВС зростає, а незміщена складова помилки ВС зменшується при зростанні параметра регулярізації а. Визначено, що аналогічні залежності зміщеної та незміщеної складових помилки спостерігаються при збільшенні кроку дискретизації іі. Таким чином, крок дискретизації іі являється другим параметром "природної регулярізації". Це дозволяє при реалізації цифрового спеціалізованого КП одержати два ступеня свободи у виборі параметра регулярізації, що на практиці істотно спрощує побудову цифрових КП з мінімумом спотворень у ВС. В четвертому розділі виконано експериментальне дослідження точносних характеристик ВС, що містять спеціалізований КП. Розроблено програмне забезпечення у інтегрованому середовищі САПР та проведено обчислювальні експерименти для чисельної оцінки якості обробки спеціалізованим КП сигналів від ВП. На Рис. 3 приведено експериментальні залежності величини помилки від параметру регулярізації а для ВС (крива 1), що містить спеціалізований КП. КП забезпечує подавлення діючих перешкод та компенсацію інерційності ВП, що моделюються аперіодичною ланкою першого (Рис.3,а,б) та другого порядків (Рис.3,в,г,д,е). Для порівняльної оцінки приведено аналогічні залежності величини помилки для ВС (крива 2), що містить найбільш близький аналог КП (А.с. 1585807 СРСР). В якості тестового сигналу на вхід ВП подавалась одинична ступінчаста дія. Вплив перешкод імітувався випадковим нормальним процесом з інтенсивністю рівної 8 = 5%, 8=10% від амплітуди вихідного сигналу ВП. Аналізуючи залежності, що приведені на Рис. 3, слід визначити, що використання у ВС розробленого спеціалізованого КП, дозволяє добитися покращення її точносних характеристик в 1,1 — 11 разів, в порівнянні з ВС, що містить найбільш близький аналог КП. а) S = 5 % б) S = 10 % в) S = 5 % г) S = 10 % д) S = 5 % е) S = 10 %Рис.3. Залежність величини помилки ВС при подавленні спеціалізованим КП діючих перешкод та компенсації інерційності ВП, який моделюється аперіодичною ланкою першого та другого порядку.На Рис. 4,а приведено результат обробки спеціалізованим КП сигналів від ВП, які моделюються аперіодичною ланкою першого порядку. Для порівняльної оцінки приводяться аналогічні результати обробки, які одержані з використанням найбільш близького аналогу КП (Рис.4,б). Коефіцієнт компенсації інерційності ВП вибирався рівним 10. а) б)Рис. 4. Результат обробки спеціалізованим КП сигналу від ВП, що моделюється аперіодичною ланкою першого порядку (1 - вихідний сигнал ВП; 2 - вихідний сигнал КП).Аналізуючи приведені результати обробки на Рис. 4 слід відзначитити, що сигнали на виході спеціалізованого КП, мають меншу амплітуду перешкод, ніж сигнали на виході найбільш близького аналогу КП. На Рис. 5 приведено результат обробки реального сигналу, що одержується від термоперетворювача, який встановлено на виробничому об'єкті - пристрою охолодження димових часток для виробництва харчових продуктів. Постійна часу термоперетворювача складала 10 с. Коефіцієнт компенсації інерційності ВП вибирався рівним 10. Рис. 5. Результат обробки спеціалізованим КП сигналу від термоперетворювача ( 1 - реальна температура; 2 - вихідний сигнал термоперетворювача; 3 - вихідний сигнал спеціалізованого КП).Порівняльний аналіз вихідного сигналу термоперетворювача (крива 2) та вихідного сигналу спеціалізованого КП (крива 3) дозволяє зробити висновок, що використання спеціалізованого КП у ВС дозволило з високим ступенем точності одержати значення вимірювальних температур пристрою охолодження димових часток. ВИСНОВКИУ дисертаційній роботі розроблено структуру спеціалізованого КП для обробки результатів непрямих вимірювань від ВП та методику розрахунку його параметрів, які забезпечують подавлення діючих перешкод та компенсацію інерційності ВП. Основні результати досліджень:1. Виконано аналітичний огляд найбільш відомих КП та визначено, що ці структури не забезпечують подавлення діючих перешкод. 2. Розроблено структуру спеціалізованого КП для подавлення діючих перешкод та компенсації інерційності ВП, що містить у ланцюзі зворотного зв'язку ланку динамічної корекції. 3. Розроблено методику розрахунку параметрів спеціалізованого КП та одержано співвідношення для розрахунку коефіцієнтів ланки динамічної корекції W(р) при подавленні діючих перешкод та компенсації інерційності ВП, що моделюються аперіодичною ланкою першого та другого порядків. 4. Проведено експериментальну оцінку точносних характеристик ВС, що містять спеціалізований КП шляхом визначення співвідношень для розрахунку зміщеної та незміщеної складових помилки ВС для його аналогової та дискретної реалізації. Доведено, що структура спеціалізованого КП має регулярізуючі властивості. 5. Обґрунтовано метод перехіду від аналогового спеціалізованого КП до цифрового спеціалізованого КП. Виконано перехід від аналогового спеціалізованого КП до цифрового спеціалізованого КП. Одержані різносні рівняння, що реалізуються цифровим спеціалізованим КП або програмним способом та знайдено співвідношення для розрахунку їх параметрів. 6. Виконано експериментальне дослідження якості обробки спеціалізованим КП результатів непрямих вимірювань від ВП. Показано, що точносні характеристики ВС, що містять спеціалізоване КП, вище в 1,1 — 11 разів (у залежності від використовуємого ВП) у порівнянні з ВС, що містить найбільш близький аналог КП. 7. Реалізація розробленої методики розрахунку параметрів спеціалізованого КП та одержаних співвідношень для розрахунку коефіцієнтів ланки динамічної корекції W(р) дозволило виключити декомпозицію спеціалізованого КП на каскади при обробці результатів непрямих вимірювань від ВП, який моделюється аперіодичною ланкою другого порядку. 8. Результати дисертаційної роботи використані при розробці блоку компенсації інерційності термоперетворювачів, які встановлено на пристрої охолодження димових часток технологічної лінії для виробництва харчових продуктів ВП "СТАСЛА" у м. Херсоні. СПИСОК ОПУБЛІКОВАНИХ ПРАЦЬ ЗА ТЕМОЮ ДИСЕРТАЦІЇ1. Задерейко А. В. Динамическая коррекция косвенных измерений // УСиМ. — 1997. — № 4/5. — С. 84 — 86. 2. Тихончук С. Т., Задерейко А. В. Компенсация погрешностей измерительных преобразователей высоких порядков / Тр. Одес. политехн. унта. — 1997. — Вып. 2: Автоматика и системотехника. Радиоэлектроника. Экология. Экономика. Гуманитарные науки. — С. 48 — 51. 3. Тихончук С. Т., Задерейко А. В. Динамическая компенсация погрешностей измерительных каналов // Труды УНИИРТ. — 1996. — № 4. — С. 26 — 28. 4. Тихончук С. Т., Задерейко А. В. Специализированное корректирующее устройство для компенсации помех и инерционности измерительных преобразователей // Труды УНИИРТ. — 1997. — № 3. — С. 42 — 45. 5. Задерейко А. В. Динамическая коррекция измерений // Автоматика - 95 : Пращ 2 - I Укр. конф. з автоматичного керування (м. Львів, 26 - 30 вересня 1995 р.). — Льв1в: НВЦ "ШС", 1995. — Т.4. — С. 54. 6. Тихончук С. Т., Задерейко А. В. Динамическая компенсация погрешности измерительных преобразователей // Автоматика - 96: Пращ 3-1 Укр. конф. з автоматичного керування (м. Севастополь, 9-15 вересня 1996 р.). — Севастополь: СевГТУ, 1996. -— Т. 2. — С. 173. 7. Задерейко А. В. Динамическая коррекция косвенных измерений / Одесский политехн. ун-т. — Одесса, 1995. Деп. в ГНТБ Украины 28.08.95, № 2005 — Ук95. 8. Тихончук С. Т., Задерейко А. В. Динамическая коррекция погрешностей измерительных преобразователей / Одесский политехн. ун-т. — Одесса, 1996. Деп. в ГНТБ Украины 01.04.96, № 827 — Ук96. 9. Тихончук С. Т., Задерейко А. В. Компенсация инерционности измерительных преобразователей высоких порядков / Одес. политехн. ун-т, — Одесса, 1996. Деп. в ГНТБ Украины 01.04.96. № 828 —Ук96. |
|






Все права на информацию для посетителей разрешены © 2011 - 2022 - Zadereyko.INFO