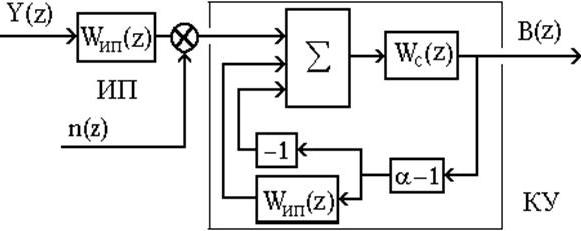
СОДЕРЖАНИЕОЦЕНКА ТОЧНОСТНЫХ ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ, СОДЕРЖАЩЕЙ ЦИФРОВОЕ СПЕЦИАЛИЗИРОВАННОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВООпределим величину ошибки ИС (Рис.3.1), содержащей цифровое специализированное КУ. Заметим, что величина ошибки sис включает в себя смещённую и несмещённую составляющие, и определяется соотношением (2.7). Рис.3.1. Структура ИС, содержащей цифровое специализированное КУ.Найдём соотношение, определяющее зависимость смещённой составляющей ошибки σсм от параметра регуляризации α для ИС (Рис.3.1), содержащей цифровое специализированное КУ при подаче на вход ИП единичного ступенчатого воздействия вида: Запишем выражение для смещённой составляющей ошибки ИС: где Wис(z) - результирующая ПФ ИС, содержащей цифровое специализированное КУ и определяемая как: Отметим, что дискретная ПФ ИП, моделируемого апериодическим звеном первого порядка имеет вид: а Wку(z) описывается дискретной ПФ (3.8). Выполним необходимые подстановки в (3.29) и дальнейшие преобразования с учётом того, что при h->∞ параметр z следует положить равным единице. В результате получим искомое соотношение, определяющие зависимость смещённой составляющей ошибки σсм от параметра регуляризации α для ИС, содержащей цифровое специализированное КУ: Анализируя соотношение (2.33) можно сделать вывод от том, что смещённая составляющая ошибки σсм возрастает при увеличении параметра регуляризации α и при увеличении шага дискретизации h.
Найдём соотношение, определяющие зависимость несмещённой составляющей ошибки σнс от параметра регуляризации α для ИС (Рис.3.1), содержащей цифровое специализированное КУ, на вход которого поступает дискретный белый шум n(z) с нормальным законом распределения и дисперсией D. Спектральная плотность сигнала Sку(jλ) на выходе цифрового специализированного КУ описывается соотношением: Тогда дисперсия сигнала Dвых на выходе КУ определяется соотношением: где Т - нормирующий множитель, равный периоду дискретности. Преобразуем (3.35) к виду: Тогда (3.36) можно записать в виде: где Отметим, что интеграл In в общем случае при любом n для устойчивой системы может быть представлен в виде (2.19). Тогда, выполнив необходимые подстановки в (2.19) и дальнейшие преобразования получим искомое соотношение, определяющее зависимость несмещённой составляющей ошибки σнс от параметра регуляризации α для ИС, содержащей цифровое специализированное КУ, которое реализует полученное разностное уравнение (3.10): Анализируя (3.37) с учётом полученного соотношения (3.39) можно сделать вывод о том, что несмещенная составляющая ошибки σнс уменьшается при увеличении параметра регуляризации α и при увеличении шага дискретизации h. Следует отметить, что аналогично могут быть найдены соотношения определяющие зависимость несмещённой составляющей ошибки σнс от параметра регуляризации α для ИС, содержащей цифровое специализированное КУ, которое реализует полученные разностные уравнения (3.19) и (3.28). |
|

Все права на информацию для посетителей разрешены © 2011 - 2022 - Zadereyko.INFO