СОДЕРЖАНИЕГИДРОАКУСТИКА И ОРУЖИЕ
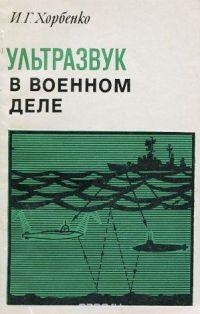
Тогда же внимание зарубежных специалистов привлек звук и ультразвук. Физические свойства акустических колебаний были использованы в дистанционных взрывателях мин и в системах самонаведения торпед. Сначала это были простые по устройству и небольшие по размерам пассивные взрыватели и системы наведения. Принцип действия акустического взрывателя основан на срабатывании при улавливании шума от винтов корабля. Простейший акустический взрыватель (рис. 15) представляет собой гидрофон, например с угольным порошком. Пока мембрана гидрофона находится в спокойном состоянии, через угольный порошок и первичную обмотку трансформатора проходит постоянный ток, который не вызывает напряжения во вторичной обмотке трансформатора. Вторичная обмотка включена в исполнительную цепь взрывателя. При возникновении шума от винтов корабля мембрана колеблется, изменяется сопротивление угольного порошка, в первичной обмотке трансформатора появляется пульсирующий ток. Во вторичной обмотке трансформатора за счет индукции тоже возникает ток, который выпрямляется и подается на реле, а затем на запальное устройство. На некоторых типах иностранных мин устанавливались более сложные акустические взрыватели, реагирующие на ультразвуковые и инфразвуковые частоты. В ультразвуковых акустических взрывателях использовались пьезоэлектрические преобразователи, чувствительные к акустическим колебаниям частотой более 16 кГц. В результате деформации пьезоэлемента от акустических колебаний на его обкладках возникает переменное напряжение, которое подается на вход усилителя, а затем на запальное устройство.
Рис. 15. Схема акустического взрывателя: 1 — электроды; 2 — мембрана; 3 — угольный порошок; 4 — батарея; 5 — трансформатор; 6 — реле; 7 — электробатарея; 8—запал; 9 — предохранительный прибор Зарубежные специалисты считают, что акустические взрыватели не должны срабатывать от шумов, не свойственных кораблям, а также от взрывов соседних мин. Они должны срабатывать только в том случае, когда интенсивность звука нарастает с определенной скоростью и сила звука достигает установленной величины. Защитное устройство предупреждает срабатывание взрывателя от других различных взрывов. На ряде зарубежных образцов мин устанавливались акустические взрыватели, работающие в активном режиме. Гидроакустическое устройство такого взрывателя непрерывно посылает ультразвуковые импульсы. При появлении корабля над миной ультразвуковые импульсы отражаются от днища и принимаются приемным устройством. Затем ультразвуковые импульсы преобразовываются в электрические и поступают на запальное устройство взрывателя. Акустические взрыватели с активной системой, по мнению зарубежных специалистов, не нашли широкого применения, так как излучение ультразвуковой энергии демаскирует мину и может быть использовано противником для ее обнаружения и уничтожения. Торпеда — давно известное и в то же время современное оружие ведения боя на мореНепрерывное совершенствование торпед привело к тому, что на них стали устанавливать различные системы самонаведения, в том числе и акустические. Акустические системы самонаведения за рубежом разделяются на пассивные и активные, а иногда они совмещаются в комбинированные системы. На торпедах с пассивной акустической системой гидрофоны улавливают шумы винтов корабля, которые затем преобразуются в сигналы, управляющие движением торпеды. Такая торпеда, как правило, устремляется в кормовую часть, где расположены винты. По мнению зарубежных специалистов, недостаток этой системы состоит в том, что при остановке машин корабля торпеда уходит в другом направлении, не поразив цель. Кроме того, против системы легко применить ложную цель — имитатор, создающий шумы, значительно превосходящие шумы от винтов корабля. Естественно, что торпеда устремится к ложной цели. Активная система самонаведения не имеет указанных недостатков, но дальность действия ее гораздо меньше. Поэтому, например, в американских торпедах дополнительно к гидрофонам устанавливается небольшая гидролокационная станция. Гидрофоны улавливают шумы, и торпеда устремляется к цели, а на определенном расстоянии гидролокатор захватывает цель. В этом случае остановка корабля не предотвратит попадание торпеды в цель. По данным зарубежной печати, сейчас многие типы торпед имеют гидроакустические системы самонаведения, работающие в пассивном и активном режимах. Движение самонаводящейся торпеды подразделяется на два этапа:поиск цели и наведение на обнаруженную цель. Поиск обычно ведется по заданной программе, а наведение — по сигналам команд управления, выданным после обработки гидроакустической информации о положении цели.
При работе в активном режиме гидроакустическая система самонаведения торпеды излучает зондирующие импульсы ультразвуковой энергии длительностью 40 мс с интервалом 1,25 секунды, поэтому информация о положении цели и сигналы команд управления имеют дискретный характер. Вследствие этого торпеда при наведении может значительно отклоняться от направления на цель, особенно при маневрировании последней, что снижает вероятность ее поражения. По мнению зарубежных специалистов, современная система управления с активной гидроакустической головкой самонаведения обеспечивает более эффективное наведение торпеды на цель по курсу и глубине, чем предшествующие образцы. Система управления позволяет удерживать горизонтальный руль в переложенном положении с момента приема отраженного эхо-сигнала до момента излучения следующего зондирующего импульса, что увеличивает точность наведения торпеды на цель.
Считается, что одним из существенных недостатков применяющихся гидроакустических систем самонаведения торпед является недостаточная дальность обнаружения подводных лодок из-за высокого уровня шумов, которые создаются потоками воды, проходящими в непосредственной близости от гидрофонов. Этот недостаток приводит к значительному увеличению времени поиска подводной лодки и повышенному расходу горючего торпеды. Зарубежными специалистами предложена система, обеспечивающая поиск подводной лодки с периодическим автоматическим выключением двигателя торпеды, что уменьшает почти до нуля уровень собственных шумов, резко сокращает расход топлива в режиме поиска и значительно увеличивает дальность обнаружения подводной лодки. Кроме того, в торпеде предусматривается устройство для управления вращением в горизонтальной плоскости относительно ее продольной оси при погружении на заданную глубину. В результате вращения торпеды лепесток диаграммы направленности гидроакустической системы самонаведения осуществляет сканирование сферической поверхности, вследствие чего расширяется сектор поиска и повышается вероятность обнаружения подводной лодки. По сообщению зарубежной печати, в США разработана усовершенствованная система самонаведения торпеды, в которой осуществляются запоминание выборочной информации о пеленге цели, обработка полученных данных и формирование автоматических управляющих сигналов команд, обеспечивающих оптимальный режим наведения на обнаруженную цель. В системе применены запоминающие и вычислительные устройства, повышающие надежность ее работы и вероятность поражения обнаруженной цели. Активная акустическая система самонаведения торпеды определяет дистанцию и пеленг цели. После сбрасывания в воду торпеда следует в заданный район, а по истечении установленного времени или после прохождения заданной дистанции включается система самонаведения. Во время следования в заданный район управление торпедой осуществляется по заданной программе. После включения системы самонаведения начинается поиск цели, и при установлении акустического контакта с ней торпеда переходит в режим преследования. Однако в этот режим торпеда переходит только после того, как сигналы, отраженные от цели, достигают амплитуды, превышающей установленный пороговый уровень. В режиме преследования данные о движении цели определяются посредством обработки выборочных сигналов, отраженных от нее. В процессе обработки формируются управляющие сигналы команд, осуществляющие перекладку руля, при которой изменяется курс торпеды. В этом режиме система самонаведения надежно удерживает цель в пределах диаграммы направленности, не теряя установившегося акустического контакта. Выбор оптимального курса торпеды на фазе преследования цели производится на основании накапливаемых данных об элементах движения цели с учетом фактора времени задержки. При этом учитывается нарастающее влияние информации, полученной последней по времени, и обеспечивается ее оптимальная селекция. Для достижения наиболее оптимальных результатов устройство для запоминания информации о пеленге цели имеет экспоненциальную характеристику временной задержки. Современные корабли противолодочной обороны капиталистических государств оснащены оружием, представляющим собой сочетание ракеты с торпедой. При обнаружении подводной лодки гидролокатором дальнего обнаружения данные поступают в электронно-вычислительное устройство, где быстро решается задача атаки подводной лодки. По выработанным данным ракета-торпеда запускается с пусковой установки и летит по заданной траектории в район нахождения подводной лодки. Ракета-торпеда американской системы «Аsroc» состоит из следующих основных частей: самонаводящейся противолодочной торпеды, ракеты-носителя, включающей блок управления и стабилизации, ракетный твердотопливный двигатель и тормозной парашют. Самонаводящаяся торпеда в отличие от обычной имеет аэродинамический наконечник для уменьшения сопротивления при полете и снижения ударного воздействия на аппаратуру. В определенных точках траектории торпеда отделяется от ракеты, и по сигналу программного устройства выдергивается парашют, на котором торпеда опускается на поверхность моря. При входе торпеды в воду парашют автоматически отделяется, и она начинает маневрирование для поиска подводной лодки. Система «Аsroc» считается зарубежными специалистами весьма перспективной, допускающей значительное усовершенствование. В частности, ведутся работы по увеличению дальности стрельбы от 9 до 18 километров и замене торпеды Мк.44 более совершенной — Мк.46. Увеличение дальности полета и замена торпеды осуществляются практически без существенных переделок ракеты и остальных элементов системы. Повышение эффективной дальности стрельбы в два раза обеспечивается применением новой гидролокационной станции АN/SQS-26, имеющей соответствующую дальность целеуказания. Для увеличения дальности стрельбы до 27—50 километров по более скоростным целям и ведения радиоуправления полетом, что намного расширяет тактические возможности ракеты, необходимо прежде всего значительное повышение дальности действия корабельных гидролокационных станций обнаружения подводных лодок. В последние годы противолодочное управляемое оружие в военно-морских силах стран НАТО представлено в основном единственной американской противолодочной ракетной системой «Subroc», предназначенной для борьбы с атомными подводными лодками. Особенностью этой системы является то, что она рассчитана на стрельбу из обычных торпедных аппаратов подводной лодки. Ее применение обеспечивается гидролокационным комплексом АN/ВQQ-2. Зарубежные специалисты изучают возможность создания на базе ракеты «Subroc», новой тактической ракеты для стрельбы с подводной лодки по подводным лодкам и надводным кораблям. Работы по созданию противолодочного управляемого оружия кроме США проводились также в Англии, Франции, Австралии. Зарубежные специалисты, считая противолодочное управляемое оружие эффективным в борьбе с атомными ракетными подводными лодками, делают вывод, что уровень развития этих средств (глубинные бомбы, мины, торпеды, ракеты-торпеды) во многом зависит от таких элементов системы противолодочной обороны, как обнаружение подводных лодок, их классификация и определение местонахождения. Следовательно, по их мнению, дальность стрельбы ракетами-торпедами, а значит, и эффективность борьбы с подводными лодками определяются возможностями гидроакустических средств обнаружения и классификации целей. |
|

Все права на информацию для посетителей разрешены © 2011 - 2024 - Zadereyko.INFO