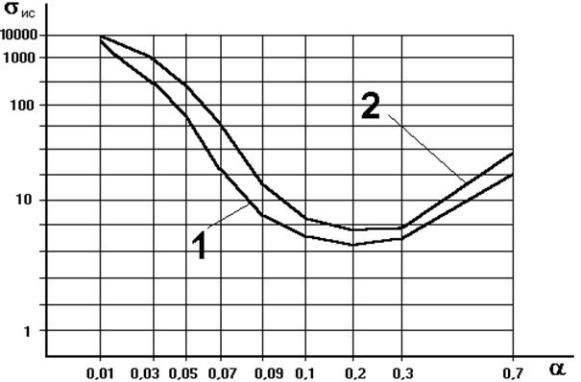
СОДЕРЖАНИЕЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ, СОДЕРЖАЩЕЙ СПЕЦИАЛИЗИРОВАННОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВОВ данном разделе приведены экспериментальные зависимости величины ошибки σис(α) для ИС (Рис.2.3), содержащей разработанное специализированное КУ, реализующее полученные соотношения для расчёта коэффициентов звена динамической коррекции Wc(p), при подавлении действующих помех и компенсации инерционности ИП, моделируемых апериодическим звеном первого и второго порядков [39], [40], [89], [91], [92], [93]. В качестве тестового сигнала на вход ИП подавалось единичное ступенчатое воздействие. Воздействие помех имитировалось случайным процессом S, с нормальным законом распределения. Для сравнительной оценки полученных экспериментальных зависимостей величины ошибки σис(α) для ИС (Рис.2.3), приведены аналогичные зависимости для ИС, содержащей наиболее близкий аналог КУ (Рис.1.9) [1], [60]. Зависимости величины ошибки σис(α) получены при идентичных тестовом сигнале и уровнях интенсивности помех. Уровень интенсивности помех для сравниваемых ИС, выбирался равным соответственно S = 1%, 5%, 10% от амплитуды выходного сигнала ИП. На приведённых ниже рисунках 4.1 - 4.9 введены следующие обозначения: 1 - зависимость величины ошибки σис(α) для ИС (Рис.2.3), содержащей разработанное специализированное КУ (Рис.2.1), при подавлении действующих помех и компенсации инерционности ИП, моделируемых апериодическим звеном первого и второго порядков; 2 - зависимость величины ошибки σис(α) для ИС, содержащей наиболее близкий аналог КУ (Рис.1.9). Зависимости величины ошибки σис(α) для ИС при подавлении специализированным КУ действующих помех и компенсации инерционности ИП, моделируемых апериодическим звеном первого порядка представлены на рисунках 4.1 - 4.3 [39], [40]. Рис. 4.1. Уровень интенсивности помех S = 1%.
Рис. 4.2. Уровень интенсивности помех S = 5%. Рис. 4.3. Уровень интенсивности помех S = 10%.Анализируя зависимости, приведённые на рисунках 4.1 - 4.3, следует отметить что величина ошибки σис(α) для ИС (Рис.2.3), содержащей разработанное специализированное КУ (Рис. 2.1) меньше в » 1,6 - 2,6 раза, по сравнению с ИС, содержащей КУ (Рис.1.9), при различных уровнях интенсивности помех.
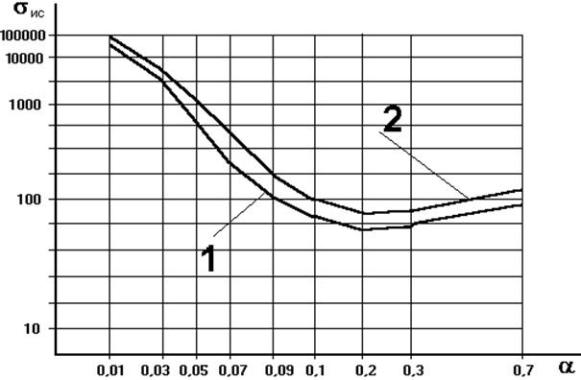
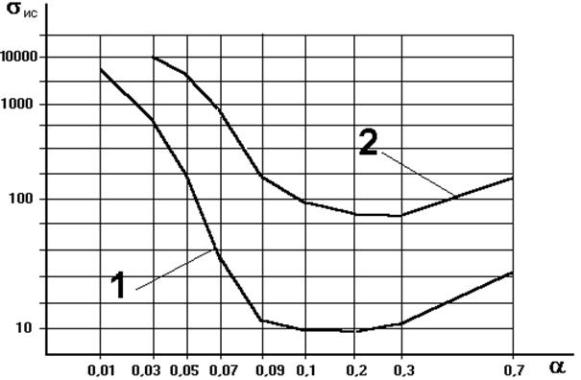
Зависимости величины ошибки σис(α) для ИС при компенсации специализированным КУ инерционности ИП, моделируемых апериодическим звеном второго порядка представлены на рисунках 4.4 - 4.6 [89], [91]. Рис. 4.4. Уровень интенсивности помех S = 1%. Рис. 4.5. Уровень интенсивности помех S = 5%. Рис. 4.6. Уровень интенсивности помех S = 10%.Анализируя зависимости, приведённые на рисунках 4.4 - 4.6, следует отметить, что величина ошибки σис(α) для рассматриваемых ИС имеет незначительные различия. Величина ошибки σис(α) для ИС (Рис.2.3), содержащей разработанное специализированное КУ (Рис.2.1) меньше в 1,1 - 1,25 раз, по сравнению с ИС, содержащей двухкаскадную структуру КУ (Рис.1.9), при различных уровнях интенсивности помех. Зависимости величины ошибки σис(α) для ИС при подавлении специализированным КУ действующих помех и компенсации инерционности ИП, моделируемых апериодическим звеном второго порядка представлены на рисунках 4.7 - 4.9 [89], [91]. Рис. 4.7. Уровень интенсивности помех S = 1%. Рис. 4.8. Уровень интенсивности помех S = 5%.
Рис. 4.9. Уровень интенсивности помех S = 10%.Анализируя зависимости, приведённые на рисунках 4.7 - 4.9, следует отметить что величина ошибки σис(α) для ИС (Рис.2.3), содержащей разработанное специализированное КУ (Рис.2.1) меньше в 9,5 - 11 раз по сравнению с ИС, содержащей двухкаскадную структуру КУ (Рис.1.9), при различных уровнях интенсивности помех. Отметим, что полученные зависимости величины ошибки σис(α) для ИС, содержащей разработанное специализированное КУ, реализующее полученные соотношения для расчёта коэффициентов звена динамической коррекции Wc(p) при подавлении действующих помех и компенсации инерционности ИП, моделируемых апериодическим звеном первого и второго порядков [39], [40], [89], [91], [92], [93] согласуются с графической зависимостью, приведённой на Рис.2.4. Это в свою очередь подтверждает наличие экстремума, в котором величина ошибки σис(α) становится минимально возможной. |
|






Все права на информацию для посетителей разрешены © 2011 - 2022 - Zadereyko.INFO